Beautiful State-Machines - FSM Part II
As I explained in my previous blog post, the idea of chatbots came quite naturally for our SSI development team. Think tanks or research labs are outstanding workplaces when you have something to chew. And how juicy topic the SSI has been, oh boy.
FSM chatbots started as a thought experiment, but now, when I think of the invention, it has been quite clever in foreseeing genuine user needs. It has lead us towards the following layer model.
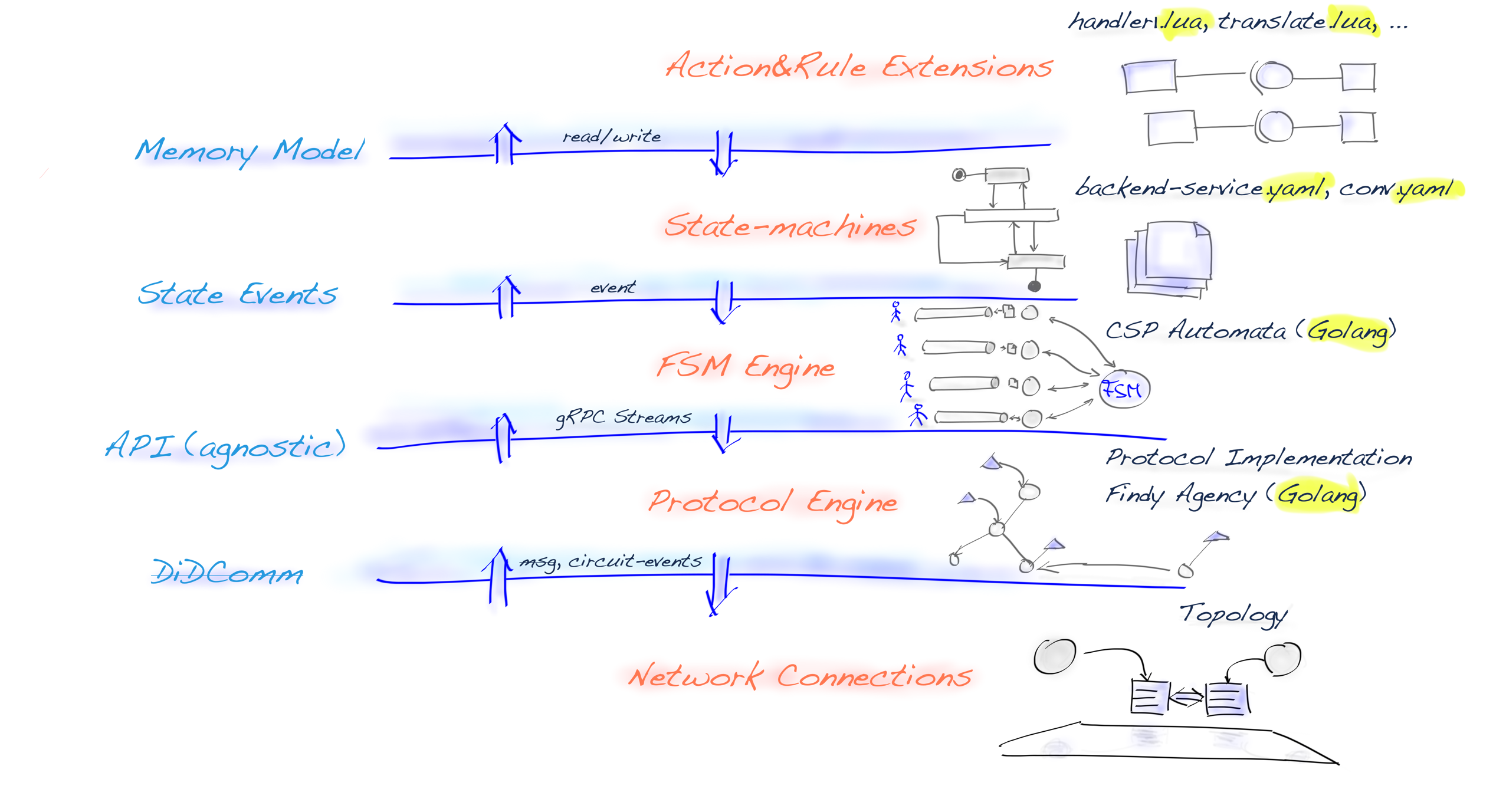
Network Layers For SSI Are Clarifying Themselves
The preceding drawing presents our ongoing layer architecture. It’s (still) based on DIDComm, but because our protocol engine implements a technology-agnostic API, we can change the implementation to something better without disturbing the above layers. The subject of this blog post is our FSM engine’s (3rd layer from bottom) CSP implementation that offers even more abstraction and helps the application development with no-code chatbot language.
Abstraction Layers
Implementing the FSM chatbots with our protocol-agnostic API has been eye-opening. With our API, we have solved most of the complexity problems and brought in an elegant communication layer that hides most of the horror of DID system, which, by to way, is not application development ready.
The objective of this blog post is to present a comprehensive exploration of my Go-based finite state-machine implementation that leverages Go’s CSP concurrency mechanism. This post will showcase the practical applications and benefits of using Go and CSP in building reliable and concurrent state management systems.
Concurrency \(\ne\) Parallelism
I have been using multithreading programming all my career and closely monitoring paradigms of multithreading programming since the 90s. When I started playing with Go’s channels and CSP programming model, I learned how easy it was compared to other asynchronous or multithreading programming models.
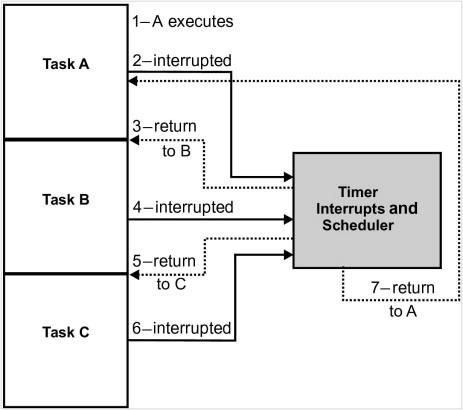
Interrupt Based Scheduling -- Mark Siegesmund, in Embedded C Programming, 2014
If I look at the phases I have gone thru, they follow these steps harshly:
- Using interrupts to achieve concurrency. (MS-DOS drivers and TSRs, modem-based distributed systems, games, etc.)
- Using the event-driven system to achieve concurrency. (Game development, GUI OS Win&Mac, transport-agnostic, i.e., modems, proprietary protocols for interconnection, Winsocks file transport framework, etc.)
- Using OS and HW threads to achieve concurrency. (Unix daemon and Win NT service programming, C/S transport framework implementations, telehealth system implementation, etc.)
- Sharing workloads between CPU and GPU to achieve maximum parallel execution. (The front/back-buffer synchronization, i.e., culling algorithms and LOD are running simultaneously in a CPU during the GPU is rendering the polygons of the previous frame, etc.)
- Using libraries and frameworks (tasks, work queues, actor model, etc.) to achieve parallel execution for performance reasons. (Using TPL to instantiation (i.e., common transformation matrix) pipeline for tessellated graphic units, etc.)
- Using frameworks to bring parallel execution to the application level, wondering why the industry starts taking steps back and prefers asynchronous programming models over, for example, worker threads. One answer: keep everything in the main thread. (iOS [recommended] network programming, Dart language, node.js, etc.)
- Using CSP to hide HW details and still achieve a speedup of parallel execution, but only if it’s used correctly. (Example: Input routine -> Processing -> Output routine -pattern to remove blocking IO waits, etc.)
As you can see, distributed computing goes hand in hand with concurrency. And now distributed systems are more critical than ever.
And what goes around comes around. Now we’re using a hybrid model where the scheduler combines OS threads (preemptive multitasking) and cooperative event handling. But like everything in performance optimization, this model isn’t the fastest or doesn’t give you the best possible parallelization results for every algorithm. But it seems to provide enough, and it offers a simple and elegant programming model that almost all developers can reason with.
Note. Go offers
runtime.LockOSThreadfunction if you want to maximize parallelization by allocating an OS thread for a job.
FSM – State-Of-The-Art
Previous technology spikes have proven that state machines would be the right way to go, but I would need to try it with, should I say, complete state machines. And that was our hypothesis: FSM perfectly matches SSI and DIDComm-based chatbots.
One of my design principles has always been that never create a new language, always use an existing one. So, I tried to search for proper candidates, and I did find a few.
SCXML
The most promising and exciting one was SCXML, but I didn’t find a suitable embedded engine to run these machines, especially as an open-source. Nevertheless, very interesting commercial high-end tools supported correctness verification using proving theorems.
Lua
During these state-machine language searches, I discovered a Go-native implementation of Lua, which was open-source. Naturally, I considered using embedded Lua’s model of states. But I realized that some event engine would be needed, and it would have brought at least the following challenges:
- Whole new API and bridge to Aries protocols would be needed. A simple C/S API wouldn’t be enough, but a notification system would also be required.
- Lua is a Turing-complete language (correctness guarantees, the halting problem, etc.)
- And final question: what extra would we be brought in when compared to offering Lua stubs to our current gRPC API, i.e., Lua would be treated the same as all the other languages that gRPC supports?
YAML
I soon discovered that YAML might be an excellent language for FSM because it’s proven to work for declarative solutions like container orchestration and many cloud frameworks.
Naturally, I tried to search OSS solution that would be based on YAML and would offer a way to implement a state-machines event processor. Unfortunately, I didn’t find a match, so we made our hybrid by offering two languages, YAML and Lua.
Lua is now included as an embedded scripting language for our FSM. It can be used to implement custom triggers and custom output events.
You can write Lua directly to YAML files or include a file link and write Lua scripts to external files. (Depending on the deployment model, that could be a security problem, but we are in an early stage of the technology. Our deployment model is closed. The final step to solve all security problems related to deployment and injection is when we have an integrated correctness tool.)
The Event Processor
Our FSM engine follows the exact same principle as the SCXML processor does:
An SCXML processor is a pure event processor. The only way to get data into an SCXML state machine is to send external events to it. The only way to get data out is to receive events from it.
In the software industry, there are some other similar systems, like, for example, eBPF, where correctness is provided without formal language. eBPF automatically rejects programs without strong exit guarantees, i.e., for/while loops without exit conditions. That’s achieved with static code analysis, which allows using conventional programming languages.
Now that we have brought Lua-scripting into our FSMs, we should also get code analysis for the exit guarantees, but let’s first figure out how good a fit it is. My first impressions have been excellent.
Services and Conversations
The drawing below includes our multi-tenant model. FSM instances and their memory containers are on the right-hand side of the diagram. The smaller ones are conversation instances that hold the state of each pairwise connection status. The larger one is the service state machine.
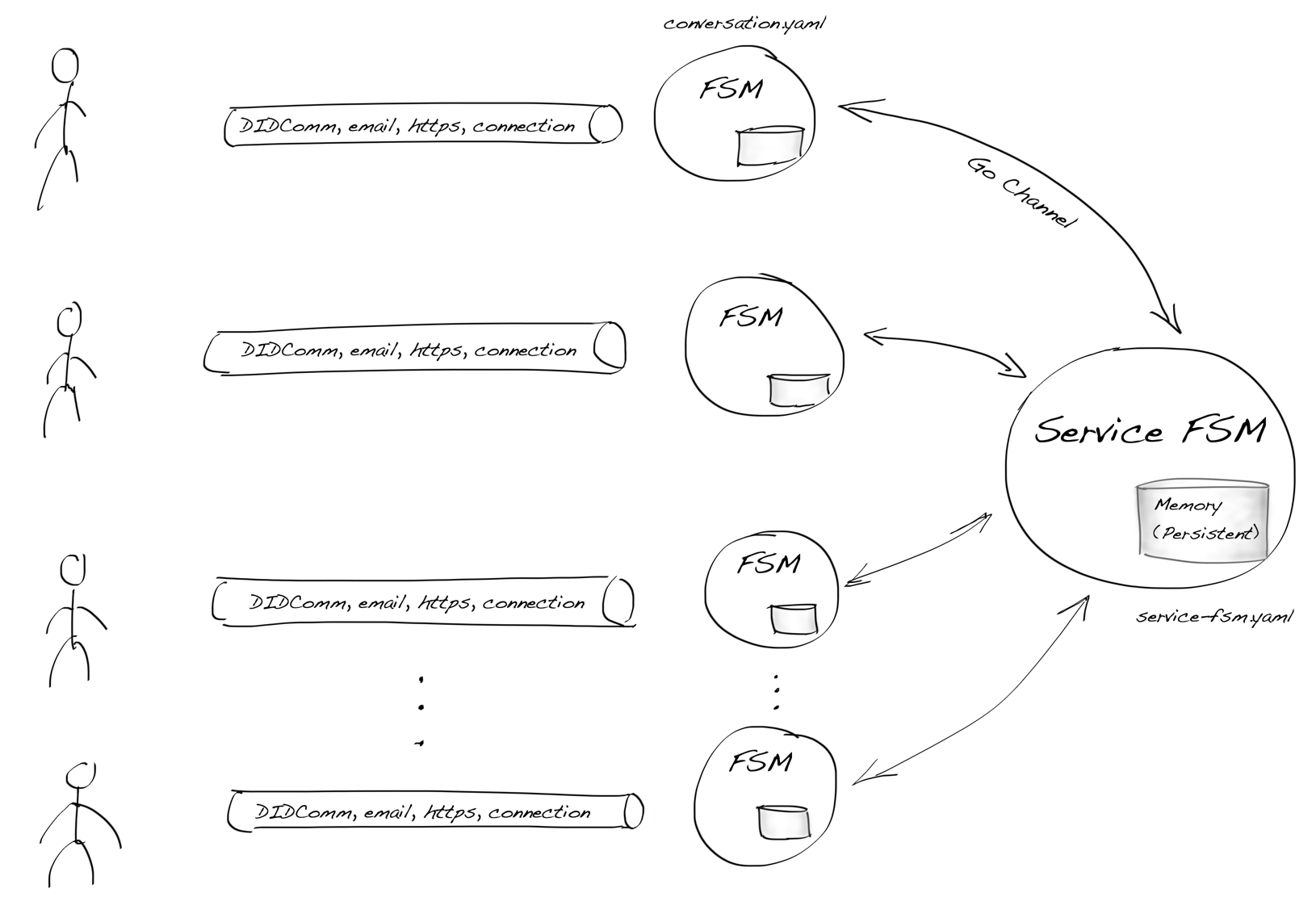
Two Tier Multi-tenancy
The service FSM is needed if the SSI agent implements a chatbot that needs to keep track of all of the conversations like polling, voting, chat rooms (used as an example), etc.
title Chat Room Example
actor "Dude" as Dude
participant "Dude" as ChatUI <<chat UI>>
collections "Dudes" as ReadUI <<read UI>>
collections "Conversation Bots" as PWBot <<pairwise FSM>>
control "Chat Room Service Bot" as Backend
== A Dude writes line ==
Dude -> ChatUI: Yo!
ChatUI -> PWBot: BasicMessage{"Yo!"}
|||
== Conversation FSM forwards msg to service FSM ==
PWBot -> Backend: BackendMsg{"Yo!"}
loop conversation count
Backend -> PWBot: BackendMsg{"Yo!"}
== transport message thru pairwise connection ==
PWBot -> ReadUI: BasicMessage{"Yo!"}
end
|||
As the sequence diagram above shows, the service FSM conceptually presents a chat room and works as a mediator between chat room participants.
The next Go code block shows how the above FSM instances are declared at the
programming level. Note that ServiceFSM is optional and seldom needed. The
rest of the data is pretty obvious:
- gRPC connection,
conn - conversation FSM,
md - and interrupt channel is given as a startup argument,
intCh, because here, the machine is started from the CLI tool
intCh := make(chan os.Signal, 1)
signal.Notify(intCh, syscall.SIGTERM, syscall.SIGINT)
chat.Bot{
Conn: conn, // gRPC connection including JWT, etc.
MachineData: md, // primary FSM data, i.e. pairwise lvl
ServiceFSM: mdService, // optional backend/service lvl FSM
}.Run(intCh) // let machine to know when it's time to quit
By utilizing the CSP model, we embrace a paradigm that emphasizes the coordination and communication between independently executing components, known as goroutines, in a safe and efficient manner. This combination of Go’s built-in concurrency primitives empowers us developers to create highly concurrent systems while maintaining clarity and simplicity in their code.
CSP & Go Code
The app logic is in the state machines written in YAML and Lua. But surprising is how elegant the Go implementation can be when CSP is used for the state-machine processor. And all of that without a single mutex or other synchronization object.
The code block below is the crucial component of the FSM engine solution. It is presented as it currently is in the code repo, because I want to show honestly how simple the implementation is. Even the all lines aren’t relevant for this post. They are left for you to study and understand how powerful the CSP model for concurrency is.
func Multiplexer(info MultiplexerInfo) {
glog.V(3).Infoln("starting multiplexer", info.ConversationMachine.FType)
termChan := make(fsm.TerminateChan, 1)
var backendChan fsm.BackendInChan
if info.BackendMachine.IsValid() {
b := newBackendService()
backendChan = b.BackendChan
b.machine = fsm.NewMachine(*info.BackendMachine)
try.To(b.machine.Initialize())
b.machine.InitLua()
glog.V(1).Infoln("starting and send first step:", info.BackendMachine.FType)
b.send(b.machine.Start(fsm.TerminateOutChan(b.TerminateChan)))
glog.V(1).Infoln("going to for loop:", info.BackendMachine.FType)
}
for {
select {
// NOTE. It's OK to listen nil channel in select.
case bd := <-backendChan:
backendMachine.backendReceived(bd)
case d := <-ConversationBackendChan:
c, alreadyExists := conversations[d.ToConnID]
assert.That(alreadyExists, "backend msgs to existing conversations only")
c.BackendChan <- d
case t := <-Status:
connID := t.Notification.ConnectionID
c, alreadyExists := conversations[connID]
if !alreadyExists {
c = newConversation(info, connID, termChan)
}
c.StatusChan <- t
case question := <-Question:
connID := question.Status.Notification.ConnectionID
c, alreadyExists := conversations[connID]
if !alreadyExists {
c = newConversation(info, connID, termChan)
}
c.QuestionChan <- question
case <-termChan:
// One machine has reached its terminate state. Let's signal
// outside that the whole system is ready to stop.
info.InterruptCh <- syscall.SIGTERM
}
}
}
It runs in its goroutine and serves all the input and output at the process
level. For those who come from traditional multi-thread programming, this might
look weird. You might ask why a lock doesn’t make conversations map thread-safe.
That’s the beauty of the CSP. Only this goroutine modifies conversations
data—no one else.
You might ask if there’s a performance penalty in this specific solution, but
there is not. The Multiplexer function doesn’t do anything that’s
computationally extensive. It listens to several Go channels and delegates the
work to other goroutines.
This model has proven to be easy to understand and implement.
Discrete State Transitions
As we saw, the Multiplexer function calls a function below, backendReceived,
when data arrives from backendChan.
func (b *Backend) backendReceived(data *fsm.BackendData) {
if transition := b.machine.TriggersByBackendData(data); transition != nil {
b.send(transition.BuildSendEventsFromBackendData(data))
b.machine.Step(transition)
}
}
Both state-machine types (conversation/service level) follow typical transition logic:
- Do we have a trigger in the current state of the machine?
- If the trigger exists, we’ll get a transition object for that.
- Ask the
transitionto build all send events according to input data. - Send all output events.
- If previous steps did succeed, make a state transition step explicit.
“Channels orchestrate; mutexes serialize”
I’m not a massive fan of the idiomatic Go or Go proverbs. My point is that you shouldn’t need them. The underlying semantics should be strong enough.
Luckily the world isn’t black and white. So, let’s use one proverb to state something quite obvious.
“Channels orchestrate; mutexes serialize”
That includes excellent wisdom because it isn’t prohibiting you from using the mutexes. It clearly states that we need both, but they are used differently. That said, the below code block shows the elegance you can achieve with Go channels.
func (c *Conversation) Run(data fsm.MachineData) {
c.machine = fsm.NewMachine(data)
try.To(c.machine.Initialize())
c.machine.InitLua()
c.send(c.machine.Start(fsm.TerminateOutChan(c.TerminateChan)), nil)
for {
select {
case t := <-c.StatusChan:
c.statusReceived(t)
case q := <-c.QuestionChan:
c.questionReceived(q)
case hookData := <-c.HookChan:
c.hookReceived(hookData)
case backendData := <-c.BackendChan:
c.backendReceived(backendData)
}
}
}
If you have never seen a code mess where a programmer has tried to solve a concurrence task by only having common control flow statements like if-else, attempt to envision an amateur cook that tries to make at least four dishes simultaneously with poor multitasking capabilities. He has to follow recipes literally for every dish from several cookbooks. I think then you get the picture.
Conclusion
I hope I have shown you how well FSM and CSP fit together. Maybe I even encouraged you to agree that SSI needs better abstraction layers before we can start full-scale application development. If you agree we’re on the right path, please join and start coding with us!